

机器人焊钳更换电机流程
工具准备:示教器触笔、漆笔、活扳手、4#内六角扳手
拆解步骤:
1、手动操作机器人,将焊枪放低,之后关闭机器人控制柜电源(工具:示教器触笔)。
技术要领:机器人焊钳移动到约1.2米-1.5米高度,便于拆卸。

2、逆时针旋转拔掉焊枪伺服电机电源线和编码器线;记录电源线和编码线接头的插座位置(用漆笔标注,红色代表电机电源线,黑色代表编码线)(工具:漆笔)。
技术要领:需垂直拔下接头是,防止内部插针弯折、损坏。

3、拆卸伺服电机盖板螺栓及电机紧固螺栓,取下电机(工具:活扳手)。
技术要领:在拆卸电机紧固螺栓时,要用力托举电机,且对称方向均匀拆卸螺栓,使为拆卸螺栓受力均匀,易被旋动;拔出电机时,注意不要磕碰电机轴,以防磕坏齿轮或造成电机轴变形。

4、拆卸与电机轴连接的传动齿轮(工具:4#内六角扳手)。
技术要领:拆卸螺栓时注意对称均匀拆卸,以便省力;在拆卸完所有螺栓后,均匀拧入三个螺栓,作为顶丝使用,使齿轮可以被轻松拆下。

5、将传动齿轮安装至新电机,并将新电机装入原电机位置,上好传动皮带,并紧固螺栓(工具:4#内六角扳手、活扳手)。
技术要领:先上皮带,后紧固电机固定螺栓,以便调整皮带张紧程度;手动触摸感觉电机皮带张紧程度。

6、将电机电源线和编码器线连接至电机,检查完毕后,打开机器人控制柜电源。
技术要领:橙色电缆线为伺服电机电源线。

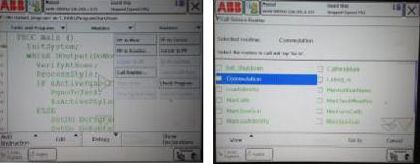
7、调用Commutation例行程序。
技术要领:注意在程序调用运行时,下部显示的提示选项,切勿乱点。
8、闭合焊枪后执行Fine calibration (工具:示教器触笔)。
技术要领:执行前先操作示教器将焊钳上、下电极帽完全贴合(A4纸不能处在中间穿过),且在执行Fine calibration 时不要上电。

9、在Fine calibration 过之后调用ManserviceCalib(工具:示教器触笔)。
技术要领:执行ManserviceCalib之前,需要将焊枪开口张开约10mm,并上电执行程序(未知电机正反转)。

10、按照示教器Jogging窗口中显示的外轴值摇到0.0,观察焊枪电极帽是否贴合;
若有明显的未闭合(>=3.0mm)的情况需要做以下步骤:
- Control Panel -> Configuration -> Montion -> Force Master -> Collision Delta Position (m)
- 按照未贴合的距离进行更改Collision Position
- 最后再调用一次ManserviceCalib
技术要领:调整时,注意焊枪的开口距离,越精确越好;且注意所填数值Collision Delta Position 是以“米”为单位。

相关阅读

最新文章
随机推荐
- 国内刻蚀机供应商崛起有望
- 想考驾照的注意了!错过本月,取证时间再延长一年!!!
- 95后动车组机械师:除夕通宵 检修上万个螺栓
- 物联网无处不在取决于Wi-Fi和蓝牙
- 福佳集团春季招聘会
- 确定,硅晶圆下季继续涨价!
- 制造联盟会介绍和合作事项
- 俄罗斯没有高端芯片,为什么却能造出一流武器?
- 福佳集团新动力第一批入职培训
- 雷蛇升级黑寡妇蜘蛛幻彩版机械键盘
- 嵌入式系统基础知识:了解嵌入式系统
- 商业化5G:如何使用标准和测试成功
- 史上最全机械年谱!从公元前5000年至今,每个机械人都应该收藏!
- 人工智能芯片的挑战与实现
- 央视净化器测评哪个好 央视公布的净化器品牌
- 瑞萨电子选择华大九天ClockExplorer™作为时钟分析优化平台
- 物联网中机器学习的挑战和机遇
- 我的手机,我还能自己修吗?
- 老外声称:宁愿在中国打短工也不愿回美国生活!现在中国太棒了!
- AI的问题:机器正在学习,但无法理解它们


最新评论
更多评论